EMG Controlled Wheelchair and Robotic arm
In this project, I developed a control system that translates EMG signals into motion commands for both a simulated wheelchair(On a TurtleBot Burger) and a Kinova Gen3 Lite 6-DOF robotic arm. The system was prototyped in simulation using Gazebo and then deployed on a real robotic platform for physical testing.
In this project, I developed a control system that translates EMG signals into motion commands for both a simulated wheelchair(On a TurtleBot Burger) and a Kinova Gen3 Lite 6-DOF robotic arm. The system was prototyped in simulation using Gazebo and then deployed on a real robotic platform for physical testing.
This project involved building a brain-computer interface system to control a wheelchair(Turtlebot) and a Kinova Gen3 Lite 6-DOF robotic arm using EMG signals. Muscle activity was captured and processed in real time using an Arduino, programmed in the Arduino IDE, to interpret activation patterns that correspond to user-intended actions.
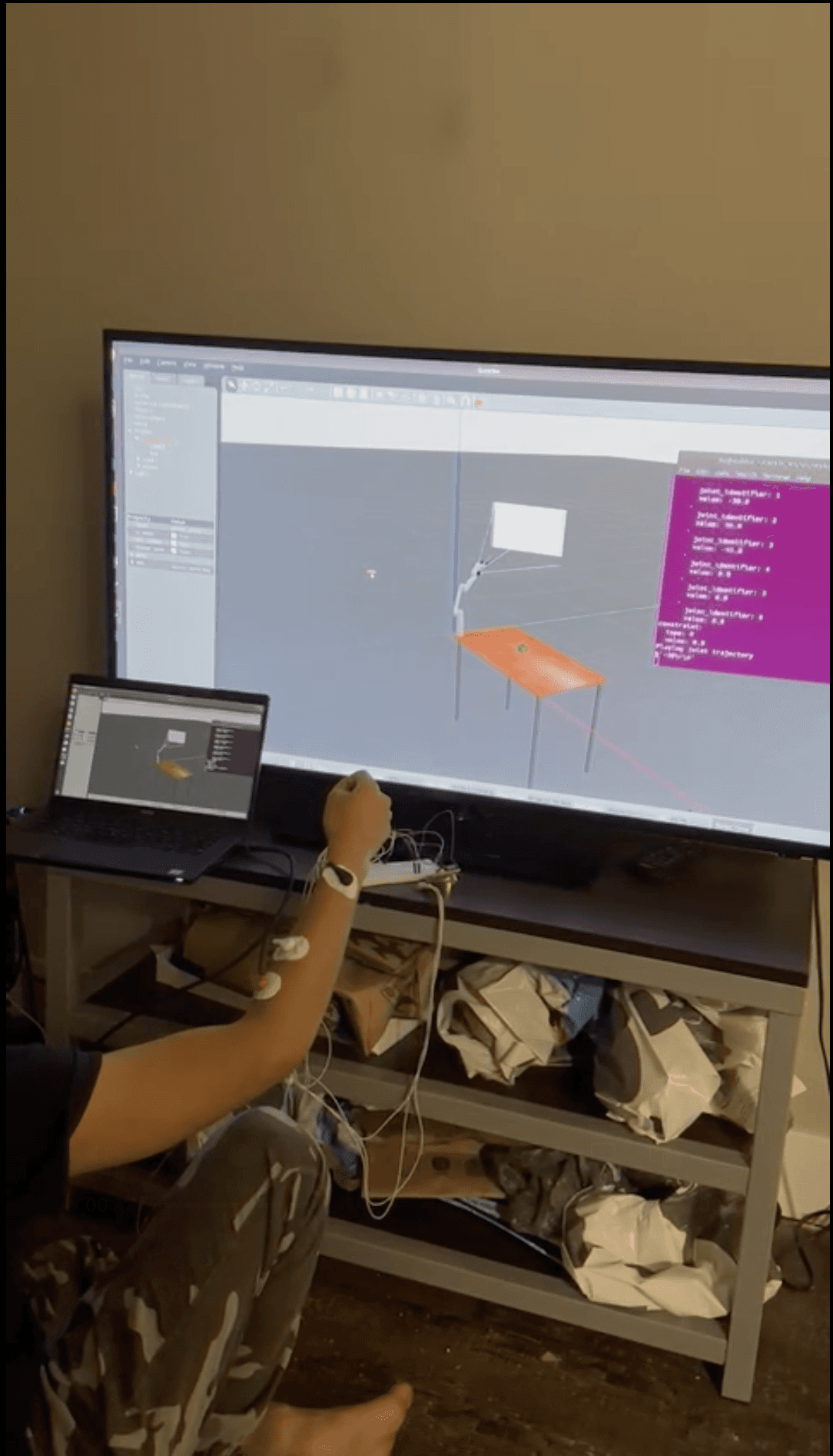
The Arduino transmitted control signals via serial communication to a host machine running Python and ROS (Robot Operating System). These signals were then converted into motion commands and integrated into a ROS-based control pipeline. For initial validation, the control logic was tested in Gazebo, where it accurately drove the movement of a simulated wheelchair and the articulation of the Kinova robotic arm.
After successful simulation trials, the system was deployed on a physical Kinova Gen3 Lite robotic arm, confirming reliable execution of real-time commands. The project demonstrated end-to-end development—from biosignal acquisition and preprocessing to robotic control—bridging embedded hardware, signal processing, and full-stack robotic software.